@article{2024tail,nav={true},title={TAIL: A Terrain-Aware Multi-Modal SLAM Dataset for Robot Locomotion in Deformable Granular Environments},author={Yao#, Chen and Ge#, Yangtao and Shi#, Guowei and Wang#, Zirui and Yang, Ningbo and Zhu, Zheng and Wei, Hexiang and Zhao, Yuntian and Wu, Jing and Jia, Zhenzhong},journal={arXiv preprint arXiv:2403.16875},year={2024},video={https://youtu.be/NvzEwUGCVLQ},}
Robotica 2024
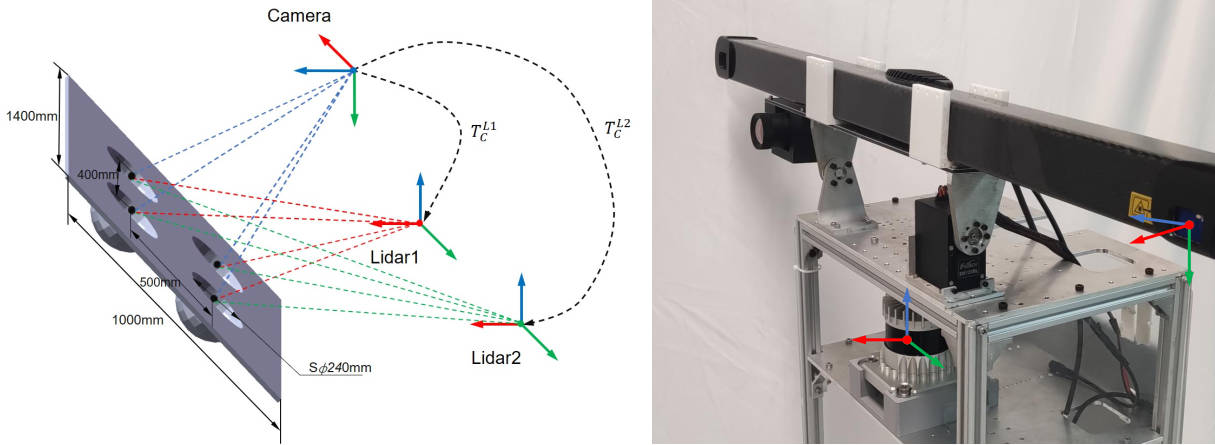
Automatic Extrinsic Calibration for Structured Light Camera and Repetive LiDARs
Yangtao Ge#, Chen Yao#, Zirui Wang, and 5 more authors
@article{ge2024contact,nav={true},title={Automatic Extrinsic Calibration for Structured Light Camera and Repetive LiDARs},author={Ge#, Yangtao and Yao#, Chen and Wang, Zirui and Huang, Bangzhen and Kang, Haoran and Zhang, Wentao and Jia, Zhenzhong and Wu, Jing},journal={Robotica},year={2024},publisher={Cambridge University Press},}
ICMRE 2023
Automatic Extrinsic Calibration for Lidar-Photoneo Camera Using a Hemispherical Calibration Board
Yangtao Ge, Chen Yao, Zirui Wang, and 3 more authors
In The 9th International Conference on Mechatronics and Robotics Engineering (ICMRE 2023) 2023
@inproceedings{ge2023automatic,nav={true},title={Automatic Extrinsic Calibration for Lidar-Photoneo Camera Using a Hemispherical Calibration Board},author={Ge, Yangtao and Yao, Chen and Wang, Zirui and Kang, Haoran and Zhang, Wentao and Wu, Jing},booktitle={The 9th International Conference on Mechatronics and Robotics Engineering (ICMRE 2023)},highlight={Best presentation award},year={2023},}
ICARM 2022
Analysis of robot traversability over unstructured terrain using information fusion
Wenyao Zhang, Shipeng Lyu, Chen Yao, and 3 more authors
In 2022 International Conference on Advanced Robotics and Mechatronics (ICARM) 2022
@inproceedings{zhang2022analysis,nav={true},title={Analysis of robot traversability over unstructured terrain using information fusion},author={Zhang, Wenyao and Lyu, Shipeng and Yao, Chen and Xue, Feng and Zhu, Zheng and Jia, Zhenzhong},booktitle={2022 International Conference on Advanced Robotics and Mechatronics (ICARM)},pages={413--418},year={2022},organization={IEEE},}
Mapping
ICARM 2024
Robust dynamic object removal in 3d point clouds based on multi-view projections
Chen Yao, Jingyi Liu, Xing Yao, and 3 more authors
In 2024 International Conference on Advanced Robotics and Mechatronics (ICARM) 2024
@inproceedings{2024mvpdor,mapping={true},title={Robust dynamic object removal in 3d point clouds based on multi-view projections},author={Yao, Chen and Liu, Jingyi and Yao, Xing and Zhang, Dingyuan and Zhu, Zheng and Jia, Zhenzhong},booktitle={2024 International Conference on Advanced Robotics and Mechatronics (ICARM)},organization={IEEE},year={2024},}
CASE 2022
Fusing panoptic segmentation and geometry information for robust visual slam in dynamic environments
Hu Zhu, Chen Yao, Zheng Zhu, and 2 more authors
In 2022 IEEE 18th International Conference on Automation Science and Engineering (CASE) 2022
@inproceedings{zhu2022fusing,mapping={true},title={Fusing panoptic segmentation and geometry information for robust visual slam in dynamic environments},author={Zhu, Hu and Yao, Chen and Zhu, Zheng and Liu, Zhengtao and Jia, Zhenzhong},booktitle={2022 IEEE 18th International Conference on Automation Science and Engineering (CASE)},pages={1648--1653},year={2022},organization={IEEE},highlight={Best Student Paper Award Finalist}}
RCAR 2022
Robust Method for Static 3D Point Cloud Map Building using Multi-View Images with Multi-Resolution
Chen Yao, Hu Zhu, Shipeng Lv, and 2 more authors
In 2021 IEEE International Conference on Real-time Computing and Robotics (RCAR) 2021
@inproceedings{2021mvrr,mapping={true},title={Robust Method for Static 3D Point Cloud Map Building using Multi-View Images with Multi-Resolution},author={Yao, Chen and Zhu, Hu and Lv, Shipeng and Zhang, Dingyuan and Jia, Zhenzhong},booktitle={2021 IEEE International Conference on Real-time Computing and Robotics (RCAR)},pages={782--787},year={2021},organization={IEEE},video={https://youtu.be/ntl-pVdmp1A},}
Perception
Robotica 2024
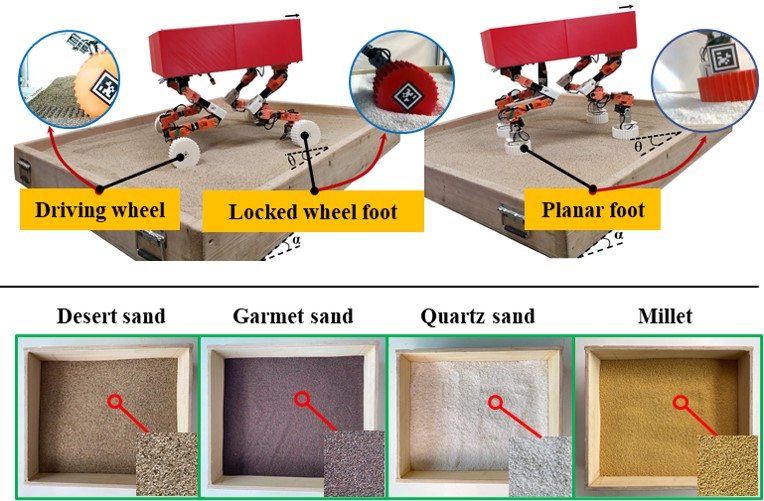
A contact parameter estimation method for multi-modal robot locomotion on deformable granular terrains
Shipeng Lyu, Wenyao Zhang, Chen Yao, and 4 more authors
@article{lyu2024contact,perception={true},title={A contact parameter estimation method for multi-modal robot locomotion on deformable granular terrains},author={Lyu, Shipeng and Zhang, Wenyao and Yao, Chen and Liu, Zhengtao and Su, Yang and Zhu, Zheng and Jia, Zhenzhong},journal={Robotica},pages={1--17},year={2024},publisher={Cambridge University Press},}
ROBIO 2023
Terrain Classification Using Inside-Wheel Cameras Based on Wheel-Terrain Interaction Characteristics
Longteng Hu, Feng Xue, Chen Yao, and 5 more authors
In 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO) 2023
@inproceedings{hu2023terrain,perception={true},title={Terrain Classification Using Inside-Wheel Cameras Based on Wheel-Terrain Interaction Characteristics},author={Hu, Longteng and Xue, Feng and Yao, Chen and Li, Yunzhou and Wei, Jin and Wang, Peichen and Zhu, Zheng and Jia, Zhenzhong},booktitle={2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},pages={1--6},year={2023},organization={IEEE},}
ROBIO 2023
Terrain Classification Based on Wheel-terrain Interaction Measurements using Aside-Wheel Camera
Feng Xue, Longteng Hu, Chen Yao, and 5 more authors
In 2023 IEEE International Conference on Robotics and Biomimetics (ROBIO) 2023
@inproceedings{xue2023terrain,perception={true},title={Terrain Classification Based on Wheel-terrain Interaction Measurements using Aside-Wheel Camera},author={Xue, Feng and Hu, Longteng and Yao, Chen and Wei, Jin and Li, Yunzhou and Wang, Peichen and Zhu, Zheng and Jia, Zhenzhong},booktitle={2023 IEEE International Conference on Robotics and Biomimetics (ROBIO)},pages={1--6},year={2023},organization={IEEE},}
ICARM 2022
Sound-based terrain classification for multi-modal wheel-leg robots
Feng Xue, Longteng Hu, Chen Yao, and 3 more authors
In 2022 international conference on advanced robotics and mechatronics (ICARM) 2022
@inproceedings{xue2022sound,perception={true},title={Sound-based terrain classification for multi-modal wheel-leg robots},author={Xue, Feng and Hu, Longteng and Yao, Chen and Liu, Zhengtao and Zhu, Zheng and Jia, Zhenzhong},booktitle={2022 international conference on advanced robotics and mechatronics (ICARM)},pages={174--179},year={2022},organization={IEEE},}
Interaction-Wheel Case
RAL 2023
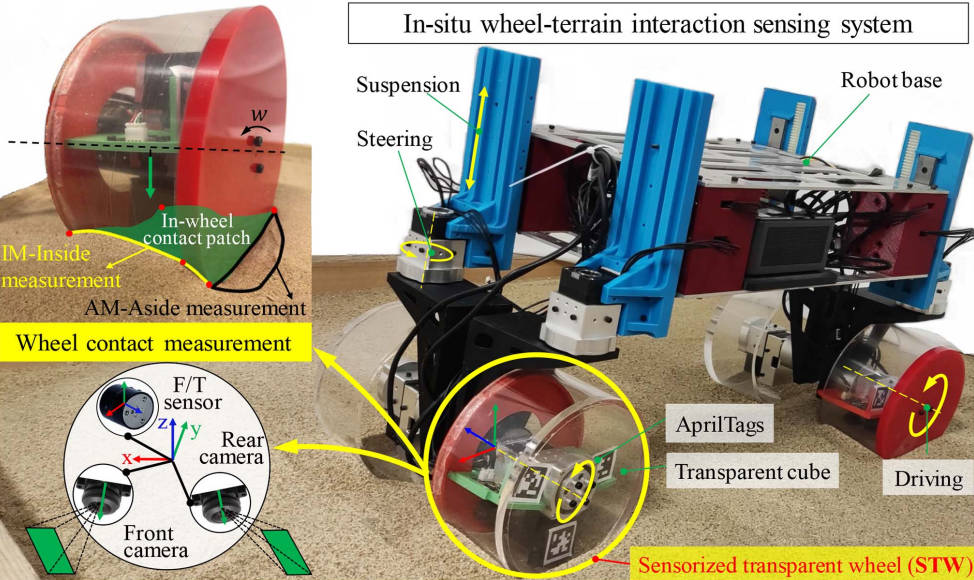
Wheel vision: Wheel-terrain interaction measurement and analysis using a sensorized transparent wheel on deformable terrains
Chen Yao, Feng Xue, Zhengyin Wang, and 4 more authors
@article{yao2023wheel,interaciton_wheel={true},title={Wheel vision: Wheel-terrain interaction measurement and analysis using a sensorized transparent wheel on deformable terrains},author={Yao, Chen and Xue, Feng and Wang, Zhengyin and Yuan, Ye and Zhu, Zheng and Ding, Liang and Jia, Zhenzhong},journal={IEEE Robotics and Automation Letters},year={2023},publisher={IEEE},video={https://youtu.be/aYKW1Pp4ENw},}
RAL 2023
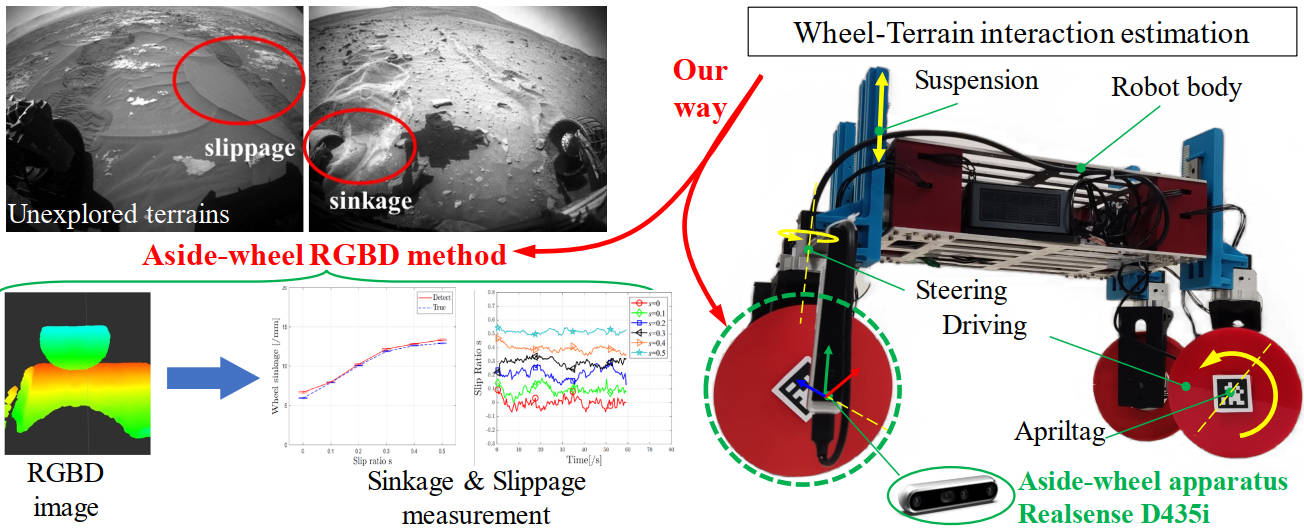
Wheel-Terrain Contact Geometry Estimation and Interaction Analysis using Aside-wheel Camera over Deformable Terrains
@article{xue2023wheel,interaciton_wheel={true},title={Wheel-Terrain Contact Geometry Estimation and Interaction Analysis using Aside-wheel Camera over Deformable Terrains},author={Xue\#, Feng and Yao\#, Chen and Yuan, Ye and Ge, Yangtao and Shi, Wujie and Zhu, Zheng and Ding, Liang and Jia, Zhengzhong},journal={IEEE Robotics and Automation Letters},year={2023},}
RAAI 2023
Wheel-Terrain Contact Geometry Estimation using the Aside-Wheel RGB-D Sensor over Soft Terrain
Pengxuan Zhang, Chen Yao, Longteng Hu, and 4 more authors
In 2023 International Conference on Robotics, Automation, and Artificial Intelligence (RAAI) 2023
@inproceedings{zhang2023terrain,interaciton_wheel={true},title={Wheel-Terrain Contact Geometry Estimation using the Aside-Wheel RGB-D Sensor over Soft Terrain},author={Zhang, Pengxuan and Yao, Chen and Hu, Longteng and Xue, Feng and Wang, Peichen and Zhu, Zheng and Jia, Zhenzhong},booktitle={2023 International Conference on Robotics, Automation, and Artificial Intelligence (RAAI)},year={2023},organization={IEEE},}
Biomimetics 2023
Modeling and analysis of a reconfigurable rover for improved traversing over soft sloped terrains
Shipeng Lyu, Wenyao Zhang, Chen Yao, and 2 more authors
@article{lyu2023modeling,interaciton_wheel={true},title={Modeling and analysis of a reconfigurable rover for improved traversing over soft sloped terrains},author={Lyu, Shipeng and Zhang, Wenyao and Yao, Chen and Zhu, Zheng and Jia, Zhenzhong},journal={Biomimetics},volume={8},number={1},pages={131},year={2023},publisher={MDPI},}
RAL 2022
Predict the rover mobility over soft terrain using articulated wheeled bevameter
Wenyao Zhang, Shipeng Lyu, Feng Xue, and 3 more authors
@article{zhang2022predict,interaciton_wheel={true},title={Predict the rover mobility over soft terrain using articulated wheeled bevameter},author={Zhang, Wenyao and Lyu, Shipeng and Xue, Feng and Yao, Chen and Zhu, Zheng and Jia, Zhenzhong},journal={IEEE Robotics and Automation Letters},volume={7},number={4},pages={12062--12069},year={2022},publisher={IEEE},}
Interaction-Leg Case
TMech 2024
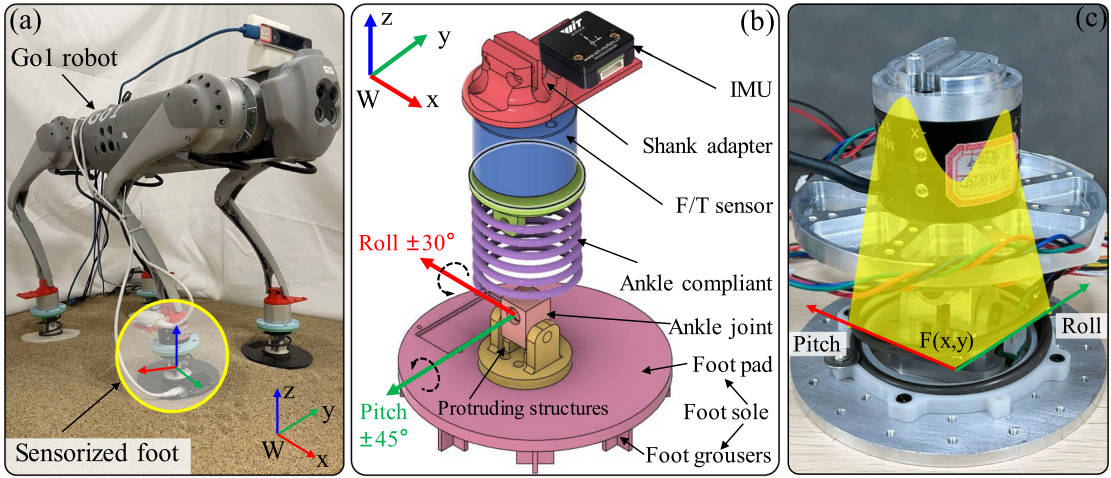
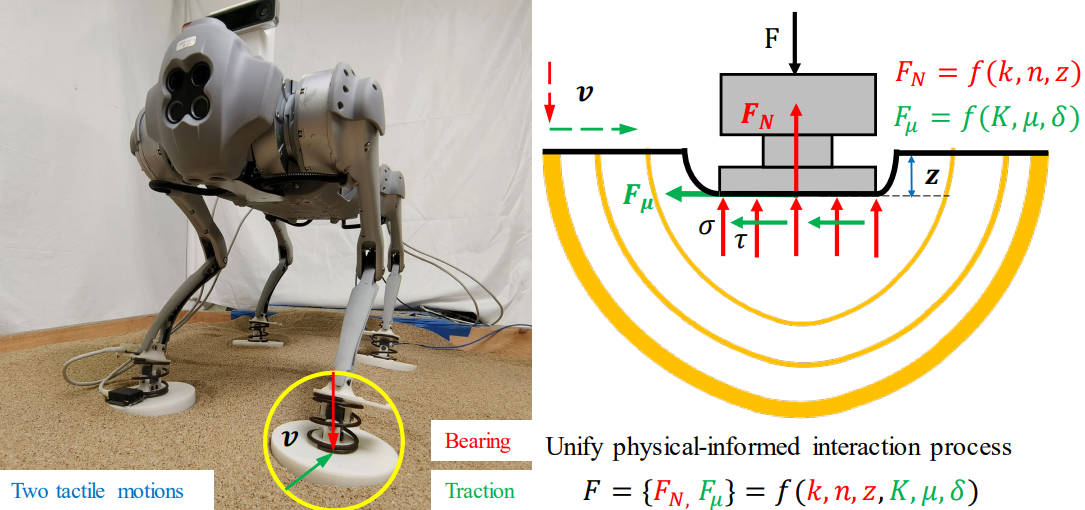
STAF: Interaction-Based Design and Evaluation of Sensorized Terrain-Adaptive Foot for Legged Robot Traversing on Soft Slopes
@article{yao2024staf,interaciton_leg={true},title={STAF: Interaction-Based Design and Evaluation of Sensorized Terrain-Adaptive Foot for Legged Robot Traversing on Soft Slopes},author={Yao, Chen and Shi, Guowei and Xu, Peng and Lyu, Shipeng and Qiang, Zhiyang and Zhu, Zheng and Ding, Liang and Jia, Zhenzhong},journal={IEEE/ASME Transactions on Mechatronics},year={2024},publisher={IEEE},}
RAL 2024
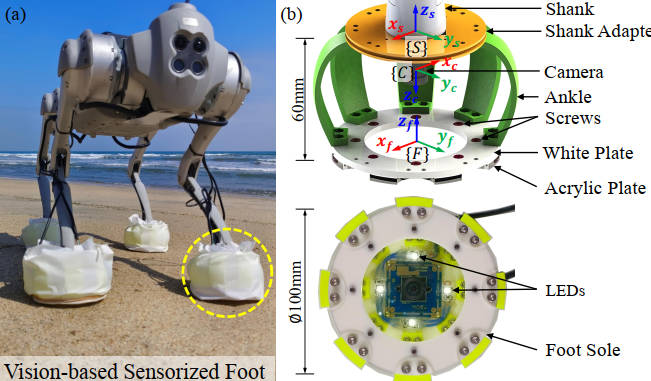
FootVision: A Vision-Based Multi-FunctionalSensorized Foot for Quadruped Robots
Guowei Shi#, Chen Yao#, Xin Liu, and 3 more authors
@article{shi2024footvision,interaciton_leg={true},title={FootVision: A Vision-Based Multi-FunctionalSensorized Foot for Quadruped Robots},author={Shi\#, Guowei and Yao\#, Chen and Liu, Xin and Zhao, Yuntian and Zhu, Zheng and Jia, Zhenzhong},journal={IEEE Robotics and Automation Letters},year={2024},publisher={IEEE},video={https://youtu.be/7q6a2JkqM4o},}
ICARM 2023
Predict the Physics-Informed Terrain Properties Over Deformable Soils using Sensorized Foot for Quadruped Robots
Chen Yao, Guowei Shi, Yangtao Ge, and 2 more authors
In 2023 International Conference on Advanced Robotics and Mechatronics (ICARM) 2023
@inproceedings{yao2023predict,interaciton_leg={true},title={Predict the Physics-Informed Terrain Properties Over Deformable Soils using Sensorized Foot for Quadruped Robots},author={Yao, Chen and Shi, Guowei and Ge, Yangtao and Zhu, Zheng and Jia, Zhenzhong},booktitle={2023 International Conference on Advanced Robotics and Mechatronics (ICARM)},pages={330--335},year={2023},organization={IEEE},}
ROBIO 2022
Adaptive Planar Foot with Compliant Ankle Joint and Multi-modal Sensing for Quadruped Robots
Guowei Shi#, Chen Yao#, Wenhui Wang, and 2 more authors
In 2022 IEEE International Conference on Robotics and Biomimetics (ROBIO) 2022
@inproceedings{shi2022adaptive,interaciton_leg={true},title={Adaptive Planar Foot with Compliant Ankle Joint and Multi-modal Sensing for Quadruped Robots},author={Shi\#, Guowei and Yao\#, Chen and Wang, Wenhui and Zhu, Zheng and Jia, Zhenzhong},booktitle={2022 IEEE International Conference on Robotics and Biomimetics (ROBIO)},pages={52--57},year={2022},organization={IEEE},}
Locomotion
Master Arxiv
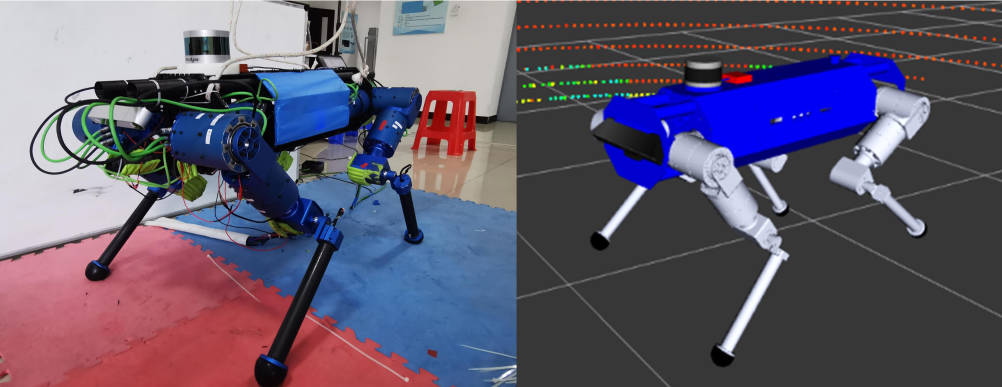
Multi-Sensor State Estimation Fusion on Quadruped Robot Locomotion
@article{2020legged,loc={true},title={Multi-Sensor State Estimation Fusion on Quadruped Robot Locomotion},author={Yao, Chen},journal={arXiv e-prints},pages={arXiv--2007},year={2020},video={https://youtu.be/I6bBXiQUZBQ},}
Master Thesis
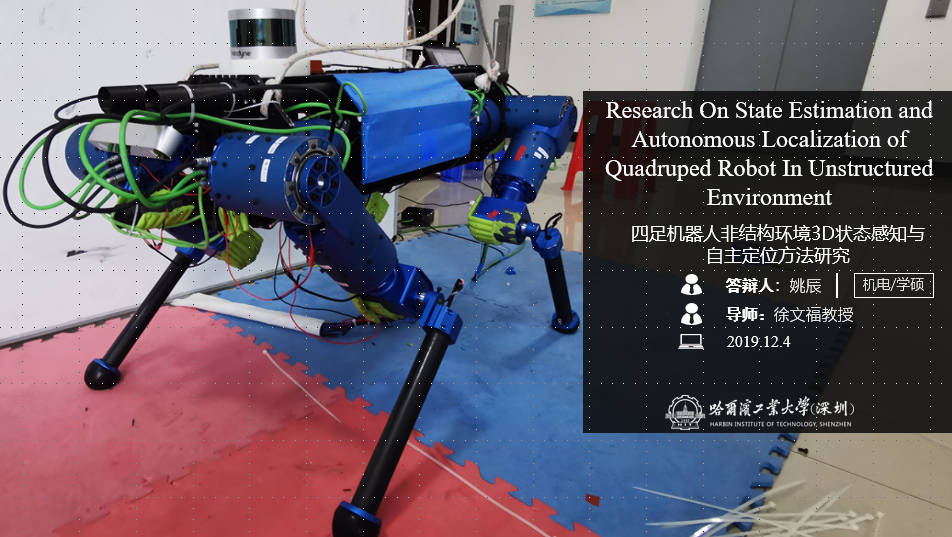
Research On State Estimation and Autonomous Localization of Quadruped Robot In Unstructured Environment
@phdthesis{2019legged,loc={true},title={Research On State Estimation and Autonomous Localization of Quadruped Robot In Unstructured Environment},author={Yao, Chen},year={2019},school={HIT},video={https://youtu.be/I6bBXiQUZBQ},}
RobotApplicaitons
CIEEC 2024
Nondestructive inspection of steel plates by using magnetic absorption robot and sh emat
Peichen Wang, Youli Chen, Jin Wei, and 4 more authors
In 2024 IEEE 7th International Electrical and Energy Conference (CIEEC) 2024
@inproceedings{zhang2023terraio,applicaiton={true},title={Nondestructive inspection of steel plates by using magnetic absorption robot and sh emat},author={Wang, Peichen and Chen, Youli and Wei, Jin and Li, Yunzhou and Yao, Chen and Li, Ce and Li, Zhichao},booktitle={2024 IEEE 7th International Electrical and Energy Conference (CIEEC)},year={2024},organization={IEEE},}
Workshops
ICRA2024 Workshop
Are We Ready for Planetary Exploration Robots?The TAIL-Plus Dataset for SLAM in Granular Environments
Zirui Wang#, Chen Yao#, Yangtao Ge#, and 7 more authors
@inproceedings{2024icra_workshop,workshop={true},title={Are We Ready for Planetary Exploration Robots?The TAIL-Plus Dataset for SLAM in Granular Environments},author={Wang#, Zirui and Yao#, Chen and Ge#, Yangtao and Shi#, Guowei and Yang, Ningbo and Zhu, Zheng and Kewei, Dong and Wei, Hexiang and Jia, Zhenzhong and Wu, Jing},booktitle={ICRA - 2024 Workshop on Field Robotics},video={https://youtu.be/NvzEwUGCVLQ},year={2024},}


 ICARM 2024Robust dynamic object removal in 3d point clouds based on multi-view projectionsIn 2024 International Conference on Advanced Robotics and Mechatronics (ICARM) 2024
ICARM 2024Robust dynamic object removal in 3d point clouds based on multi-view projectionsIn 2024 International Conference on Advanced Robotics and Mechatronics (ICARM) 2024