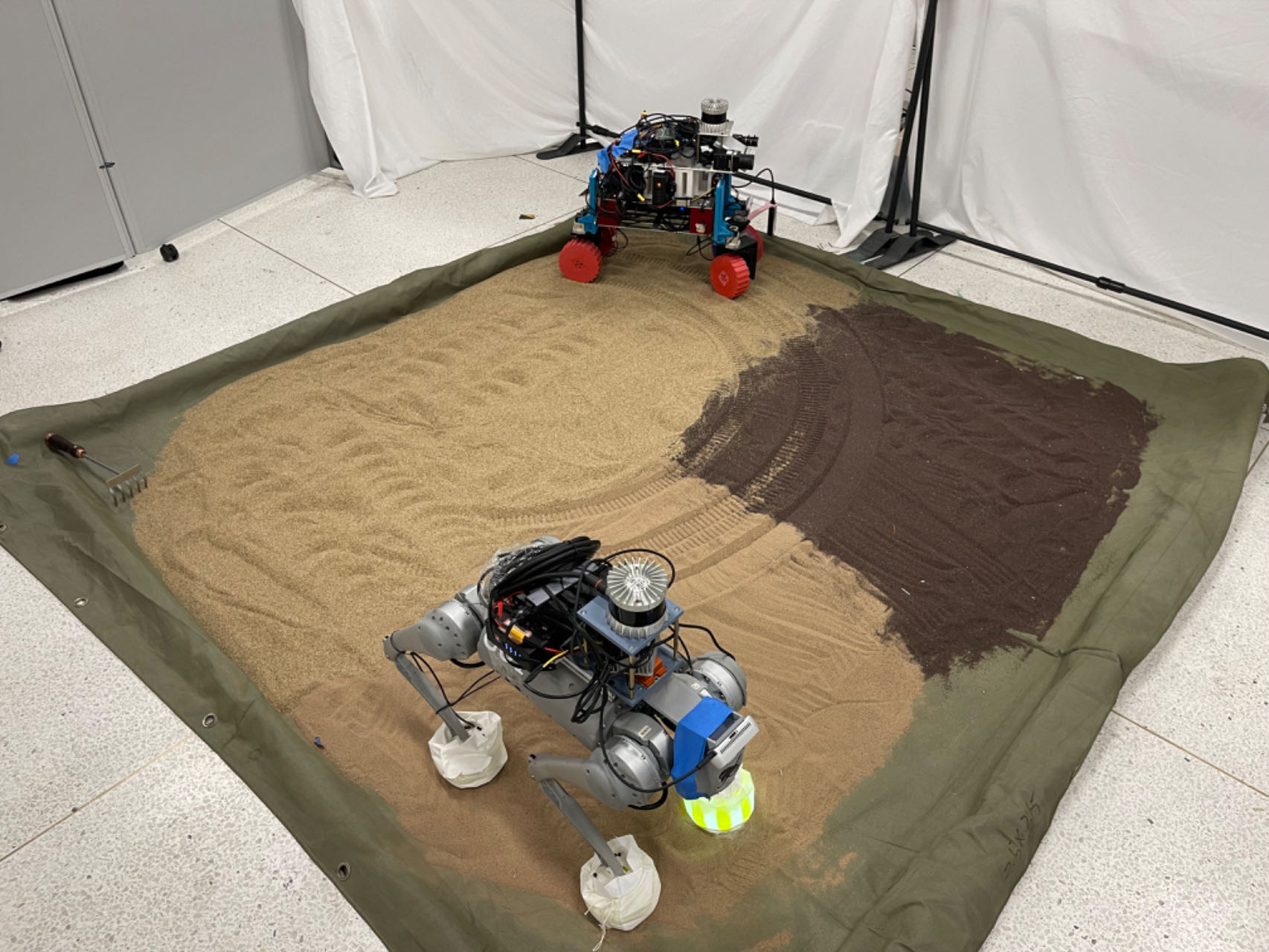
work phd tests Ultized wheel/leg robots to perception the interaction and dynamic surrouding dataset Developed TAIL dataset in soft beaches located in Shanhaili, Huizhou, China slam Developed slam and tested in drones/handpack/backpack/wheel robots line detect course project which fusion the instance segmentation and lane detection fun 2018 DJI AI challenge 2017 Battlebot in Shanghai 2016 Trash-bot in harbin